

当谈论端到端自动驾驶的时候,我们到底在谈论些什么
端到端自动驾驶目前尚不成熟,但作为今年的各家厂商必争的领域,写一些自己的理解
端到端自动驾驶目前尚不成熟,但作为今年的各家厂商必争的领域,写一些自己的理解
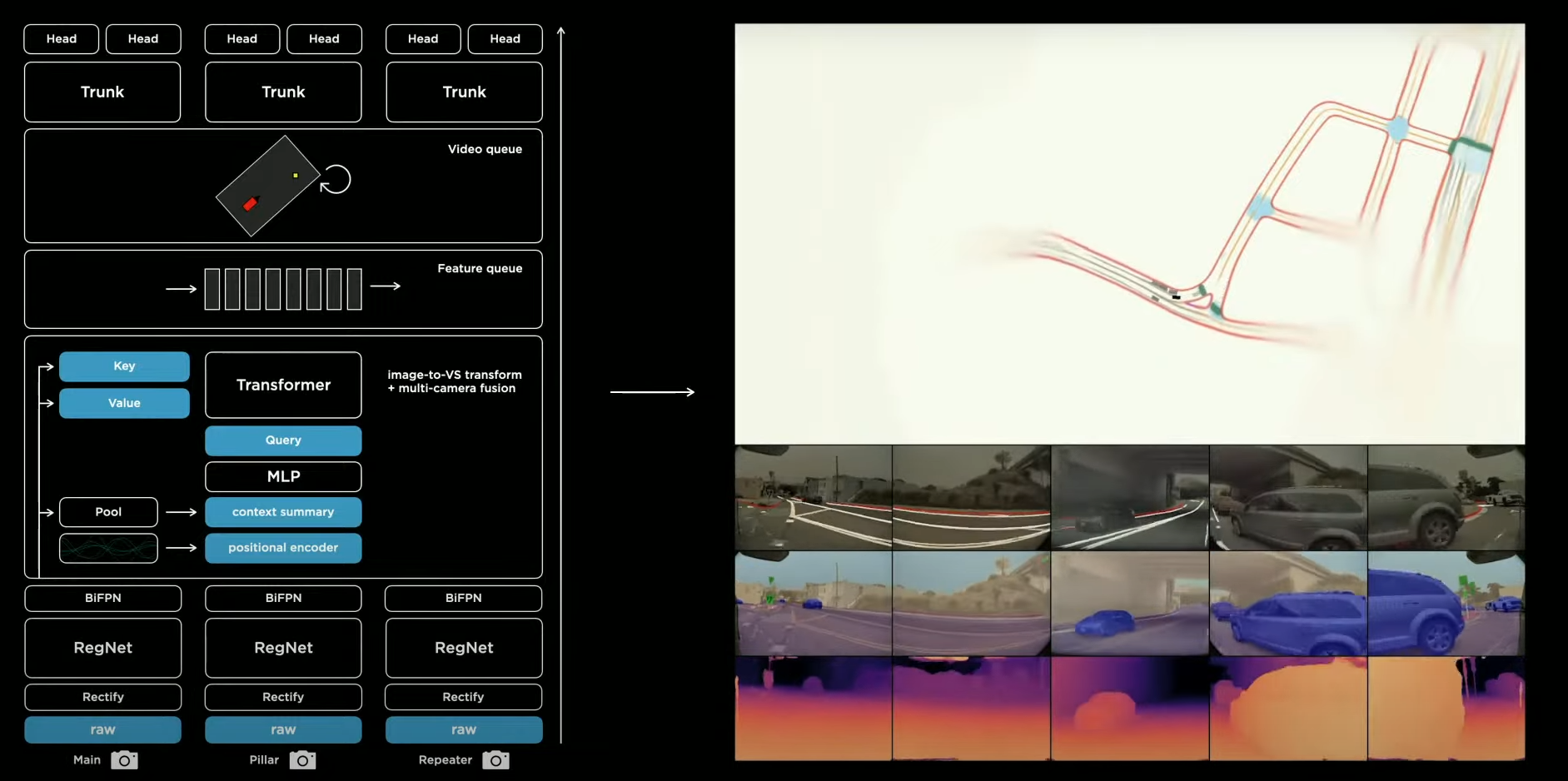
现实世界往往不能通过简单的 2D 图像去近似,最直观的想法就是加维度。时间上加维度就是视频,空间上再加维度就是 3D 数据例如点云,在其他属性上加维度就是多模态。真实场景遇到的数据是会更具挑战性的。而自动驾驶就是这样的典型场景,下面通过 Tesla AI Day 的 Tesla Vision 部分去介绍一下 Tesla 自动驾驶的感知方案。
该篇文章大概记录了我在 Datawhale 的“实际工作中数据和模型的价值"的相关分享。

希望今后能够多研究 kaggle 的目标检测竞赛方案,在精(排)益(列)求(组)精(合)的路上越来越顺利,越来越有自己的想法。
第一次写竞赛记录,希望能够在赛后完善自己的分析流程,并学习他人的方案进行反思。
高质量C++编程指南(林锐)阅读笔记
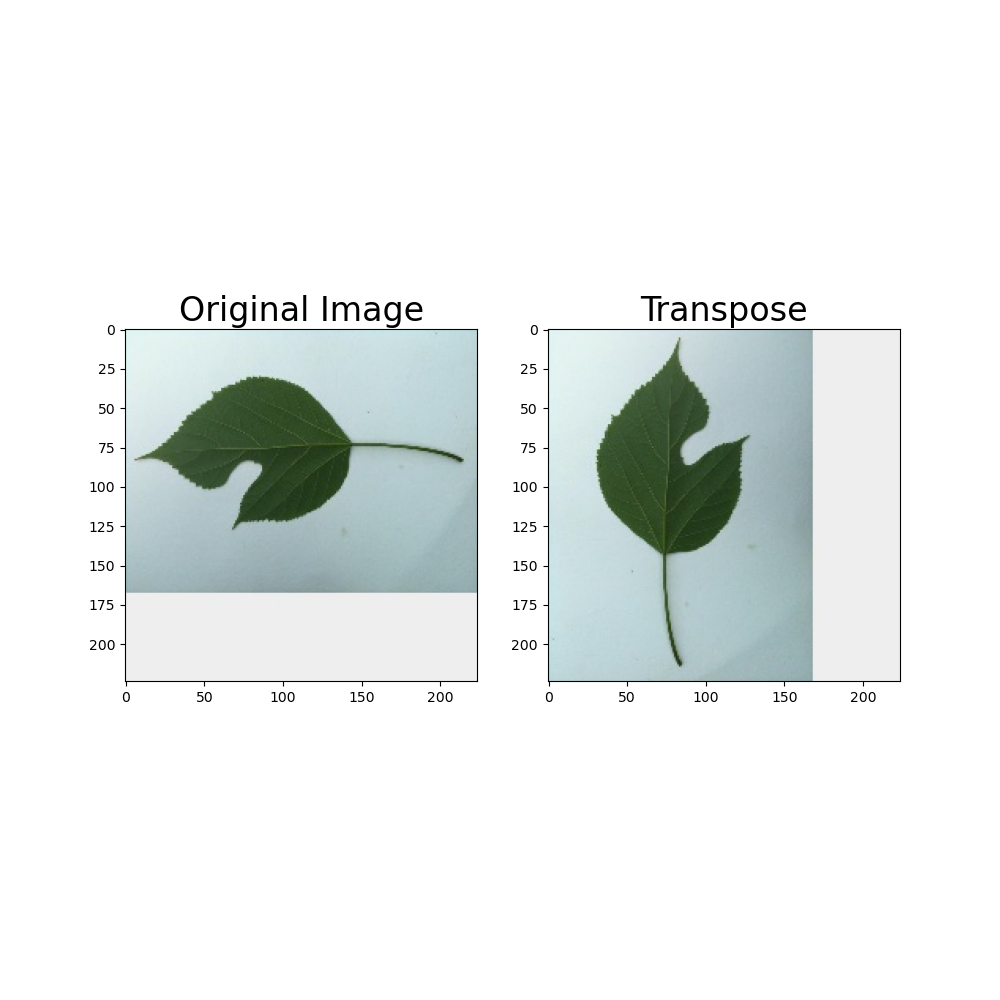
在深度学习中,数据十分重要。在我们构造的网络较为庞大的情况下,相当于我们需要从假设空间中以数据驱动的方式学出一种相应的参数组。而网络越宽越深越复杂,往往其参数越多,所以我们需要更多的数据去逼近一个可用解,在本节中,我大致介绍一下我们能够为数据做点什么
写这篇文章的初衷是希望在众多的开源baseline中,我想要形成我自己的一套pipeline。所以我将在近期的几个竞赛中开始尝试并逐渐整理出一套简洁易用的pipeline